Rollback
The Rollback structural pattern is a derivative of the Checkpoint Recovery architectural pattern and the Fault Recovery strategy pattern in the original resilience design pattern specification (Fig. 32) [B24]. It offers containment and mitigation with recovery backward to the time when the snapshot occurred. The following describes the Pattern and its application in the System Scope and in the Service Scope of the INTERSECT federated ecosystem for instrument science. Note that the Pattern description uses the terms system, subsystem, and service in an abstract way, while the System Scope and the Service Scope map those terms to the INTERSECT federated ecosystem.
Pattern
- Problem
A hardware or software error or subsystem or service failure due to a physical fault (e.g., wear-out or destruction) or a design fault (e.g., resource underprovisioning) causes a software, such as a service, to experience an error due to loss of or corrupted state, and potentially a subsequent failure.
- Context
The pattern applies to a system that has the following characteristics:
The system is deterministic, i.e., forward progress of the system is defined in terms of the input state to the system and the execution steps completed since system initialization.
The error or failure in the system that the pattern handles must be detected, as the pattern offers no error or failure detection.
The system is capable of compartmentalizing its state that is accurately representative of the progress of the system since initialization at the time such state is captured.
The system operation has well-defined intervals that enable the pattern to transition the system to a known correct interval in response to an error or failure.
The system is capable of saving its current state and loading a previously saved state.
- Forces
The pattern requires additional storage to capture system state or to log messages or events, which increases overhead in terms of resources required by the system.
The amount of state captured during each creation of a recovery point incurs storage space and execution time overheads.
The creation frequency of system state snapshots determines overhead. More frequent snapshot creation increases system execution time, but reduces the amount of lost work upon an error or failure.
The time interval for the recovery of a system from a snapshot as well as the time interval to create a snapshot must be less than the system’s mean-time between failures (MTBF) to guarantee forward progress.
- Solution
The pattern enables the resumption of correct operation of a system impacted by an error or failure. It supports resilient operation by restoring the system to a known correct state in the event of an error or failure. Rollback solutions are classified into checkpoint-based and log-based strategies.
The checkpoint-based strategy relies on the creation of system state snapshots and the maintenance of such checkpoints on a persistent storage system that is not affected by the error or failure. Upon detection of an error or failure, the most recent snapshot is used to recreate the last known error/failure-free state of the system. The log-based strategy relies on logging, i.e., storing the information of events, such as messages sent between different parts of the system or to the system as input, on a persistent storage that is not affected by the error or failure. Upon detection of an error or failure, the log is replayed to recreate the last known error/failure-free state of the system. In contrast to the checkpoint-based strategy, the log-based strategy is able to offer resilience in the presence of non-deterministic events and for non-deterministic systems, as replaying the event log deterministically recreates system state.
The checkpoint and log-based strategies may be used together, where events are logged in-between snapshots. With both strategies, the operation of the system is resumed when the system state is recovered. Based on a temporal view of the system’s progress, the error/failure recovery is backward to the time when the snapshot occurred. When the system is partitioned into several subsystems, the pattern must coordinate the process of checkpointing. The pattern may use the following checkpointing methods:
- Coordinated Checkpointing
The subsystems coordinate the process of creating checkpoints. The coordination enables a globally consistent checkpoint state, which simplifies the recovery.
- Uncoordinated Checkpointing
The subsystems each independently decide when to create their respective checkpoints. This has the potential to cause a domino effect, where rollbacks propagate among system components due to lack of consistency, potentially back to the initial state.
- Communication-based Checkpointing
Each subsystem creates local checkpoints, but periodically also enforces coordinated checkpoints between all subsystems as backstop for the domino effect.
The log-based recovery is based on a piecewise deterministic assumption, in which the system identifies nondeterministic events and the information necessary to replay the event during recovery is captured and logged. The following logging protocols for non-deterministic events may be used by the pattern:
- Pessimistic Message Logging
The protocol assumes that an error or failure occurs after a nondeterministic event in the system. Therefore, the determinant of each nondeterministic event is immediately logged to persistent storage. The error/failure-free overhead of this approach is high.
- Optimistic Message Logging
The determinants are held in a volatile storage and written to persistent storage asynchronously. This protocol makes the optimistic assumption that the logging is completed before the occurrence of an error or failure. The error/failure-free overhead of this approach is low.
- Causal Message Logging
This protocol provides a balanced approach by avoiding immediate writing to persistent storage (much like the optimistic protocol to reduce error/failure-free overhead), but each subsystem commits output independently (like the pessimistic protocol to prevent creation of orphan subsystems).
Undetected (latent) errors that are either detected later or result in a different detected error or failure later represent a problem, as the most recent or even more snapshots may contain an illegal system state. In this case, the most recent correct snapshot may be used to recreate the last known error/failure-free state of the system, skipping snapshots containing illegal state and going further back in time in terms of when the snapshot was made. The components of this pattern are illustrated in Fig. 48.
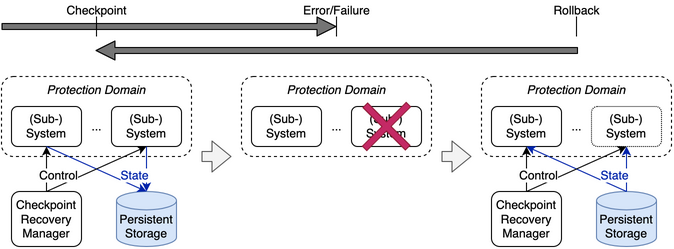
Fig. 48 Rollback pattern components
- Capability
A system using this pattern is able to continue to operate in the presence of an error or failure with some interruption and some loss of progress. This pattern provides mitigation of an error or failure in the system by preserving system state on a persistent storage before an error or failure, using a checkpoint-based and/or log-based strategy, and restoring the previously preserved system state upon such an event to resume operation from a previously preserved known correct state. The flowchart of the pattern is shown in Fig. 49, the state diagram in Fig. 50, and its parameters in Table 9.
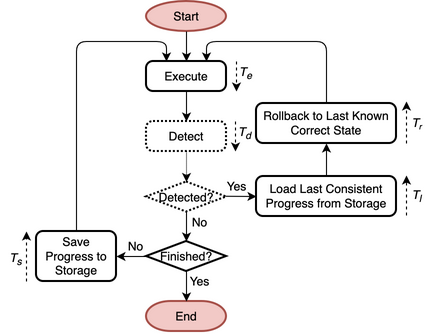
Fig. 49 Flowchart
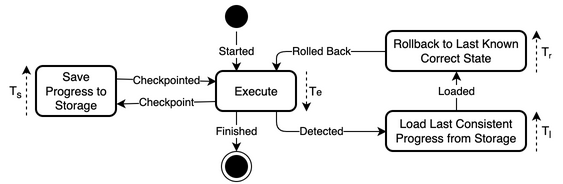
Fig. 50 State diagram
Table 9 Rollback pattern parameters Parameter
Definition
\(T_{e}\)
Time to execute system progress
\(T_{d}\)
Time to detect an error/failure (not part of this pattern, but shown for completeness)
\(T_{l}\)
Time to load consistent system state and progress from storage
\(T_{r}\)
Time to rollback to the last known correct state (initial and/or previously saved)
\(T_{s}\)
Time to save system state and progress to storage
- Protection Domain
The protection domain extends to the previously preserved system state that can be recreated using the system state captured by snapshots stored on persistent storage.
- Resulting Context
Correct operation is resumed after an error or failure impacted the system. Progress in the system is lost after an error or failure, since the recovery is only able to recreate the system state to the time when the snapshot occurred. The system is interrupted during error/failure-free operation for creating system state snapshots and maintaining them on a persistent storage system. The system is interrupted upon an error or failure for recreating the last known error/failure-free state of the system.
A trade-off exists between the creation frequency of system state snapshots and/or event logging and the corresponding execution time overhead during error/failure-free operation vs. the amount of lost progress. The optimal solution of this trade-off depends on the MTBF, the time it takes to save and load a system state snapshot, the time it takes to log events, and the time it takes to recreate the system state.
This pattern does not provide error or failure detection and may be used in conjunction with other patterns to be fully functional. This pattern may be used in conjunction with other patterns that provide containment and mitigation in a complementary fashion, where some error/failure types are covered by the other pattern(s) and this pattern covers for the remaining error/failure types.
- Performance
The error/failure-free performance \(T_{f=0}\) of the pattern is defined by the task’s total execution time without any resilience strategy \(T_{E}\) and the time spent on saving system state and progress to storage \(T_{s}\) during task execution, with a total number of checkpoints \(N\). Assuming a constant checkpoint interval \(\tau\), the total number of checkpoints \(N_{constant}\) is defined by the task’s total execution time without any resilience strategy \(T_{E}\) divided by \(\tau\). \(T_{d}\), time to detect an error/failure, is not part of this pattern.
\[\begin{split}\begin{aligned} T_{f=0} &= T_{E} + N T_{s}\\ N_{constant} &= T_{E} / \tau \end{aligned}\end{split}\]The performance under errors/failures \(T_{f!=0}\) is defined by the error/failure-free performance \(T_{f=0}\), plus the total lost time to execute system progress \(T_{EL}\) and the total time to load consistent system state and progress from storage and to rollback to the last known correct state \(T_{R}\). Assuming constant times to save system state and progress to storage \(T_{s}\), to load consistent system state and progress from storage \(T_{l}\), and to rollback to the last known correct state \(T_{r}\), the performance under error/failure \(T_{f!=0}\) can be further simplified with a total number of errors/failures (\(T_{f!=0,constant}\)), using the the mean-time to interrupt (MTTI) \(M\). The performance under errors/failures \(T_{f!=0}\) can also be calculated [B53] using a first-order (\(T_{f!=0,first}\)) and a higher-order (\(T_{f!=0,higher}\)) approximation for an optimal checkpoint interval \(\tau_{first}\) and \(\tau_{higher}\), respectively, and the mean-time to interrupt (MTTI) \(M\).
\[\begin{split}\begin{aligned} T_{f!=0} &= T_{E} + N T_{s} + T_{EL} + T_{R}\\ T_{f!=0,constant} &= T_{E} + N T_{s} + T_{EL} + \frac{T_{E}}{M}(T_{l} + T_{r})\\ T_{f!=0,first} &= T_{E} + \left(\frac{T_{E}}{\tau_{first}} - 1 \right) T_{s} + \frac{T_{E}}{M} T_{e,f} (\tau + T_{s}) + \frac{T_{E}}{M} (T_{l} + T_{r})\\ \tau_{first} &= \sqrt{2 M T_{s}}\\ T_{f!=0,higher} &= M e^{(T_{l} + T_{r})/M} \left( e^{(\tau_{higher}+T_{s})/M} - 1 \right) \frac{T_{E}}{\tau_{higher}}\\ \tau_{higher} &= \sqrt{2 M T_{s}}\left[ 1+\frac{1}{3}\left(\frac{T_{s}}{2M}\right)^{1/2} + \frac{1}{9}\left(\frac{T_{s}}{2M}\right)\right] - T_{s} \end{aligned}\end{split}\]- Reliability
Given that the pattern enables the resumption of correct operation after an error or failure, the reliability of a system employing it is defined by errors and failures that are not handled by the pattern, such as failures of the persistent storage. The reliability after applying the pattern \(R(t)\) can be obtained using the performance under errors or failures that are handled as part of the protected the system \(T_{f!=0}\) and the assumed constant probabilistic rate \(\lambda_{u}\) of errors and failures of the unprotected part of the system that are not handled (or its corresponding inverse, the MTTI \(M_{u}\)).
\[\begin{aligned} R(t) = e^{-\lambda_{u} T_{f!=0}} = e^{-T_{f!=0}/M_{u}} \end{aligned}\]- Availability
The availability of the pattern can be calculated using the task’s total execution time without the pattern \(T_{E}\) and performance under errors/failures \(T_{f!=0}\). \(T_{E}\) is the planned uptime (PU) \(t_{pu}\). \(T_{f!=0}\) is the planned uptime (PU) \(t_{pu}\), the scheduled downtime (SD) \(t_{sd}\), and the unscheduled downtime (UD) \(t_{ud}\).
\[\begin{aligned} A = \frac{T_{E}}{T_{f!=0}} = \frac{t_{pu}}{t_{pu}+t_{ud}+t_{sd}} \end{aligned}\]
- Examples
Many HPC applications implement application-level rollback by regularly saving intermediate results to persistent storage as checkpoints and supporting the capability to load such a checkpoint in addition to some or all of the original data upon restart to recreate the last known correct state. Library-based solutions, such as FTI [B54], permit tracking of state that needs to be saved and restored. System-level solutions, such as DMTCP [B55], support transparent state saving and restoration using OS support.
- Rationale
The pattern enables a system to tolerate an error or failure through resumption of correct operation after impact. It relies on the capability to preserve system state before an error or failure, often in a periodic fashion, and restore the previously preserved system state upon such an event to resume operation from a known correct state. The pattern performs proactive actions, such as preserving system state, but mostly relies on reactive actions after an error or failure impacted the system.
Progress in the system is lost after an error or failure, as the recovery is only able to recreate the system state to the time when the snapshot occurred. Error or failure detection is not part of the pattern. The preserved system state is managed on persistent storage, which is not part of the protection domain. The containment and mitigation offered by this pattern are independent from the type of error or failure. The pattern has very little design complexity and has low dependence on a system’s architecture, which makes it appealing as a general and portable solution.
System Scope
In the context of INTERSECT Systems, Subsystems, and Services, this pattern can be applied to INTERSECT systems and subsystems. It would be primarily applied to an entire infrastructure system and its subsystems, as opposed to an entire logical system that spans across multiple infrastructure systems. It could be applied to a logical subsystem of an infrastructure system only.
Service Scope
In the context of INTERSECT Systems, Subsystems, and Services, this pattern can be applied to an INTERSECT service. If it is applied to a group of services, then this is typically within the System Scope. However, it could also be applied to interconnected services, such as to services participating in the same campaign.
Microservice Scope
In the context of the INTERSECT Microservices Architecture, this pattern can be applied to an INTERSECT microservice. If it is applied to a group of microservices, then this is typically within the Service Scope.