Local Design of Experiments
- Name
Local Design of Experiments
- Context
The pattern applies to a system with the following characteristics:
An experiment design plan exists that lists the predetermined actions to be performed for creating a new experiment plan based on prior experiment results.
An initial experiment plan exists that lists the predetermined actions to be performed while running the experiment.
A local experiment planner exists that creates the new experiment plan based on prior experiment results.
A local experiment controller exists that executes the predetermined actions to be performed while running the experiment.
A local experiment analyzer exists that orients the observed information for the experiment planner.
Sensors exist to allow for measuring experiment results.
Actuators may exist to allow for moving or controlling something before, during and/or after running the experiment.
Additional sensors may exist to allow for measuring something before, during and/or after running the experiment.
Instruments may exist that contain sensors and potentially actuators.
Robots may exist that contain actuators and potentially sensors and that execute predetermined actions from the experiment plan in an automated or autonomous fashion.
A component may exist that post-processes raw experiment data, such as to identify features.
- Problem
Certain predetermined actions need to be performed to run a set of similar experiments with different experiment plan parameters, depending on experiment results. Experiment results are analyzed and judged locally. There are no remote components that could incur a significant communication delay.
- Forces
Only pre- and post-experiment conditions are considered in performing the predetermined actions to run a set of similar experiments with different experiment plan parameters. Only safety-related conditions during the experiment may be considered. Other changing conditions during the experiments are not considered, unless the Experiment Steering strategic pattern is being used in conjunction with this architectural pattern, such as by using the Local Experiment Steering or Distributed Experiment Steering architectural patterns.
Experiment results are analyzed and judged without significant communication delay to remote components. Proper computational analysis and decision making capability must be present locally to be able to respond within a certain amount of time.
- Solution
The is pattern implements the Design of Experiments strategic pattern using an OODA loop control. All components of the OODA loop control are local, i.e., physically located and connected in a way that does not incur a significant communication delay between the components.
As in the Design of Experiments strategic pattern, an experiment controller executes each experiment using a predetermined experiment plan (Fig. 16). The plan’s execution is automated, performed in an open loop control and may involve human interaction. The controller may monitor the experiment for safety reasons. The experiment plan contains a complete description of the predetermined actions to be performed for running the experiment, including any safety-related responses. An experiment planner creates the experiment plan, based on an experiment design plan and prior experiment results (if any). The experiment plan change is autonomous, performed in a closed loop control and may involve human interaction. The experiment design plan contains an initial experiment plan and a plan for creating new experiment plans based on experiment results, including how to analyze and judge experiment results and change the plan accordingly. Raw experiment data may be post-processed by an optional component, such as to identify features.
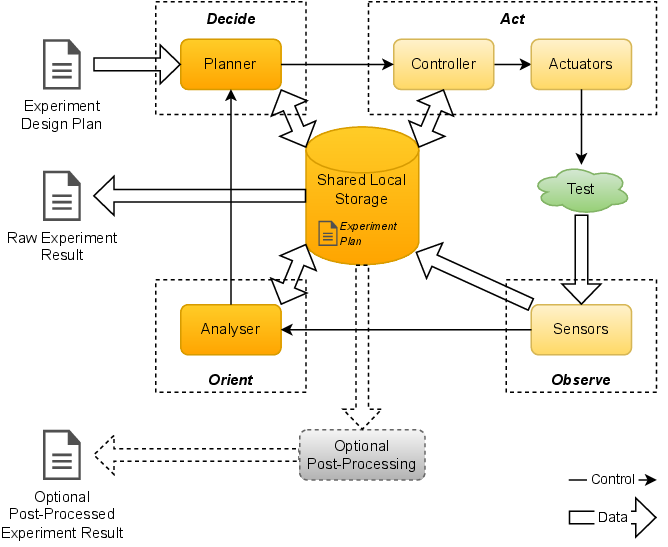
Fig. 16 Local Design of Experiments architectural pattern components and control/data flow
The OODA loop control is formed by sensors that observe the experiment, an analyzer that orients the observed information, an experiment planner that decides on appropriate actions, and an experiment controller and actuators that perform the appropriate actions. As all components of the OODA loop control are local, a shared storage device may be used between them for sensor, analyzer, planner and controller data. Control messages between these components orchestrate the control flow.
This pattern offers an open loop control with safety-related feedback on the experiment and a separate closed OODA loop control with feedback on experiment results. Experiment plan execution is automated within the open loop control, i.e., its list of actions is performed without external or human intervention that can unnecessarily hold up execution. Experiment design plan execution is autonomous, i.e., it creates a new experiment plan after each experiment based on experiment results and is performed without external or human intervention that can unnecessarily hold up execution. A set of similar experiments with different experiment plan parameters is controlled. There is no significant communication delay to remote components in the open loop control, as the experiment controller is local. There is also no significant communication delay to remote components in the closed OODA loop control, as the experiment result analysis and experiment planner are local as well.
- Resulting Context
An experiment is executed autonomously with different experiment plan parameters using a predetermined experiment plan, with the plan’s parameters changing autonomously between experiments based on experiment results. Experiment results are analyzed and judged locally, i.e., without significant communication delay to remote components.
- Related Patterns
This architectural pattern implements the Design of Experiments strategic pattern. It relies on the Experiment Control strategic pattern for automatically executing a predetermined experiment plan. This architectural pattern can be extended using the Experiment Steering strategic pattern (instead of the Experiment Control strategic pattern) for autonomously executing a predetermined experiment plan, with the plan’s parameters changing autonomously during experiments based on experiment progress. Such extension may involve the Local Experiment Steering or Distributed Experiment Steering architectural patterns.
In contrast to this architectural pattern, the Distributed Design of Experiments architectural pattern analyzes and potentially also judges experiment results remotely, i.e., with significant communication delay to remote components.
- Examples
An ACL science use case implements the Local Design of Experiments architectural pattern, as all components (planner, controller(s), robot, synthesis station(s), and characterization station(s)) are local, i.e., in close physical and logical proximity with no significant latency (for communication or sample movement) to remote components.
The experiment is a complex sequence of steps involving multiple instruments, actuators, sensors, etc. Thus, the experiment itself could be considered a Local Multi-Experiment Workflow architectural pattern using a sequence of Local Experiment Control architectural patterns. Examples of steps that constitute the Local Multi-Experiment Workflow architecture include the synthesis step and each of the individual characterization steps, such as the gas chromatography, high performance liquid chromatography, and X-ray microscopy. Some of these steps could potentially be performed in parallel if the sample were broken down into pieces such that the pieces could be analyzed by the characterization instruments in parallel. There is a significant overlap of the different components of the patterns, as the same shared storage is being used, for example.
- Known Uses
This architectural pattern is used in every experiment, where feedback of experiment results is being used to autonomously change the parameters of the next experiment(s) using components that are all local, i.e., in close physical and logical proximity with no significant latency (for communication or sample movement) to remote components. Known uses range from having simple linear or random parameter scan to complex probabilistic approaches (e.g., Bayesian design of experiments) or domain science informed AI (e.g., physics-informed design of experiments) in the feedback loop.